
是利用技术研发的一种传感器,传感器的主要组成部件是既可以发射声波又可以接受声波的压电晶片。用作探测的传感器具有不同的结构,可分为直探头、双探头、斜探头等。构成压电晶片的材料、厚度也各不相同。
测距原理是通过发射器发射声波,当声波遇到障碍物时返回,通过声波的传导速度和返回的时间计算出发射器距障碍物的距离,这就是时间差测距法。也是一种声波,其传播速度与温度、压强等因素有关,但在温度变化不大的时候可以忽略温度的影响。如果对测距的要求较高,应当采用温度补偿的方法进行校正。
传感器的硬件组成如图所示。发送电路由晶体管电阻,T/R40-16 压电陶瓷传感器和变压器组成。由相关资料可知,频率为40kHz左右的在空气中的传播效率最佳。其工作原理如下:

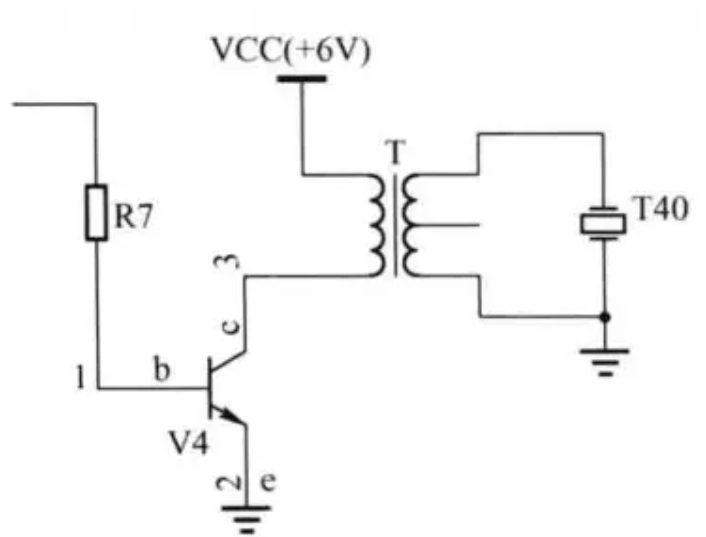
刚开始工作时,单片机通过软件编程初始化端口,使引脚RA2为低电平,此时发射电路不工作。系统初始化完毕,单片机通过软件控制RA2引脚输出高电平使晶体管集电极变为低电平,然后变压器把这个电压升高,加载到传感器T40的两端,产生。若在有效测距方位内有被测物的话, 则在后一路发送出之前应当接收到前一路发出的回波,否则认为前面没有障碍物。系统最大的测量距离范围为9.99m,所以脉冲间隔时间为t=2s/v=2×9.99m/340 m/s=59 ms。电路由接收传感器和一个放大,滤波电路组成,图4-6所示为接收电路。其工作原理如下:由于在距离比较远的情况下,的回波会变得很弱,因此接收传感器转换为电信号的幅值也较小,所以要经过信号的放大。当接收传感器接收到信号后,经过一个放大电路,R40引脚由低电平变为高电平,单片机停止计数,计算距离。
1. 测距模块:这是最常见的传感器类型。通常由发射器和接收器组成,可以测量物体与传感器之间的距离。发射器发出脉冲,然后接收器接收并测量脉冲的回程时间,从而计算出距离。
2. 动态测距模块:与普通的测距模块相比,动态测距模块可以提供更高的测距精度和快速测量速度。它适用于需要频繁测量或快速移动目标的应用。
3. 声呐传感器:声呐传感器主要应用于水下测距和避障。它利用声波在水中传播的特性,通过发送信号并接收其回波,来测量水下目标的距离和位置。
4. 声纳传感器:声纳传感器主要应用于声纳定位和水下导航。它利用声波在水中传播和反射的原理,通过接收声波信号的强度和延迟来确定目标的位置和方向。
5. 存在计测传感器:这种传感器可以检测物体的存在或缺失。当物体进入或离开传感器的工作范围时,传感器将检测到信号的变化,并发送给控制系统进行相应的处理。
这些是传感器的一些常见类型,根据具体的应用需求和场景,选择适合的传感器可以实现不同的功能和测量要求。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

分别测量小车左方、左前方、前方、右前方、右方障碍物的距离,并根据所测数据采取相应的避障措施。
也存在一定的局限性,主要是因为波束角大、方向性差、测距的不稳定性(在非垂直的反射下)等,因此往往采用多个
自发射至接收往返时间的计时,单片机选用8751,经济易用,且片内有4K的ROM,便于编程。电路原理图如图2
系统由于成本高等的原因,在一些中小规模的应用领域中难以广泛应用。随着汽车智能化的发展,需要研制出能够以更高的精度测距的新式
市场的很大一部分。随着越来越多的产品实现了自动化,随着机器人、自动驾驶汽车和无人驾驶飞机的出现,需求进一步增长
对全透明或有色板块物块,金属材料或非金属材料物块,固态、液體、粉末状化学物质均能检测。其检测特性几乎不受一切自然环境
介质温度的升高而有所加快,温度提高了一度,速度提高0.6 m/s左右。原理结构如图2所示。图2
在空气中传播的时间来计算风速,随着人们对于海洋的开发与利用,这种设备也逐渐的在海洋领域得到了广泛的应用因为人们在开发海洋的同时,也要预防海洋
具有测量精度好、功能多的优势,而且它的探头的结构比较简单,在很多应用领域中他替代了传统的风速风向
市场的很大一部分,在过去的几十年中不断地取得进展。近年来,由于自动驾驶汽车、机器人和无人驾驶飞机的出现,对
主要材料有压电晶体(电致伸缩)及镍铁铝合金(磁致伸缩)两类。电致伸缩的材料有锆钛酸铅(PZT)等。压电晶体

